YouTuber builds DIY exoskeleton aim assist, cuts latency to 17 ms, lands second on Aimlabs leaderboard
How far can DIY robotics push gaming performance? Nick Zetta, the inventive mind behind the YouTube channel Basically Homeless, set out to find out by building a homegrown exoskeleton designed to boost aim in video games. What started as a personal challenge to beat an Aimlabs score of 135,000 turned into a wild blend of comedy, engineering grit, and computer-vision wizardry.
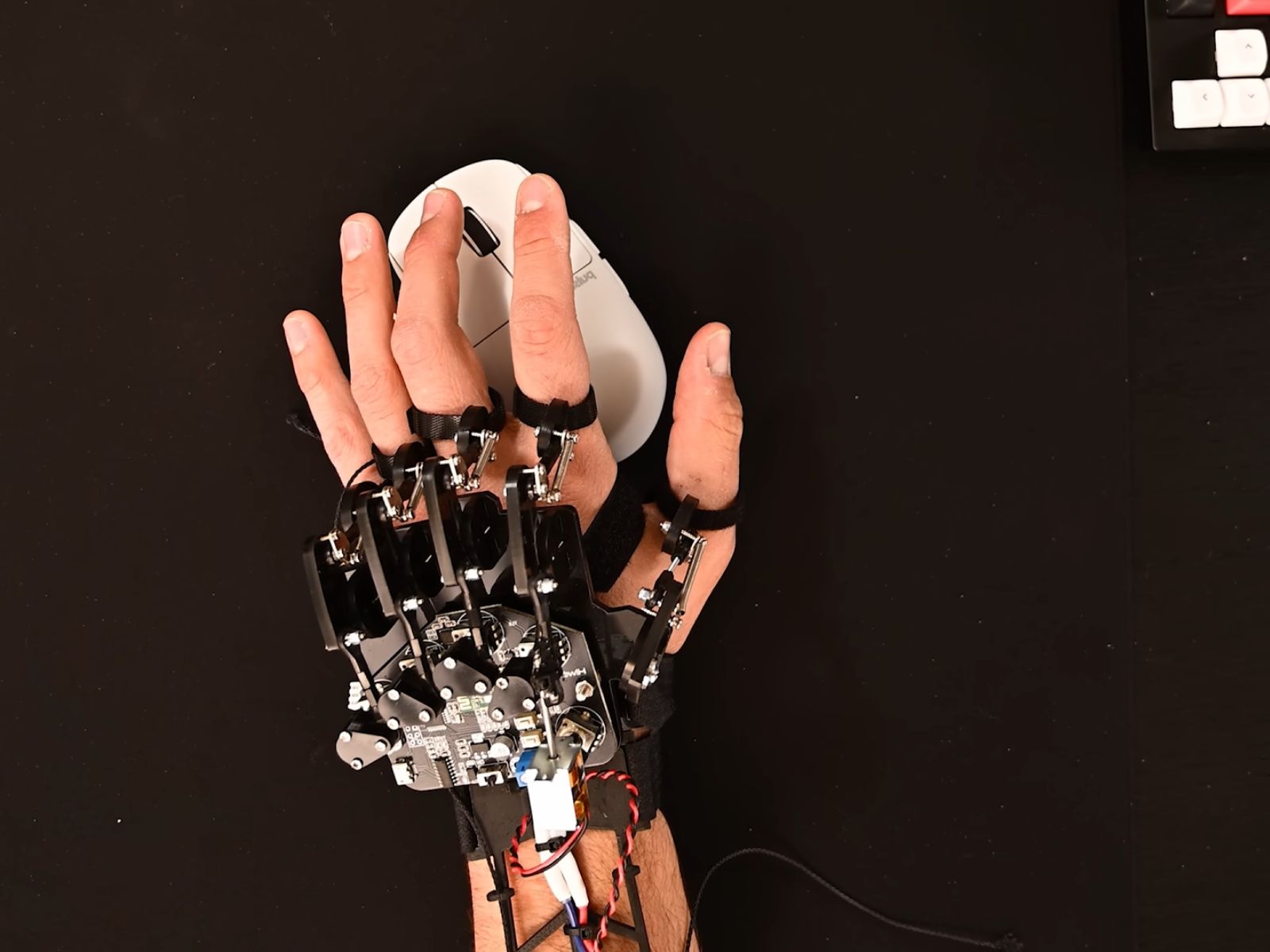
Zetta’s concept came together around three core pieces. First, a motorized wrist assist to physically steer the mouse with precise, repeatable movements. Second, a solenoid-powered “finger clicky exoskeleton” to trigger shots with machine-grade consistency. And third, a computer-vision system trained to spot targets on-screen and react faster than human reflexes. It’s the kind of Rube Goldberg-meets-robotics project that only a determined tinkerer would dare attempt.
The build didn’t come easy. Early versions struggled with messy wiring, encoder issues, and latency that made the setup feel sluggish. The breakthrough came when Zetta paired an Nvidia Jetson board with a custom-trained YOLO model, then refined the hardware to trim every unnecessary millisecond. The result: a snappy 17 ms end-to-end response that feels almost instantaneous in-game.
With latency tamed and the exoskeleton dialed in, Zetta rocketed up the Aimlabs global leaderboard, ultimately landing in second place. He cheekily framed the device as an “anti-scammer eye replacement exoskeleton,” walking the fine line between clever assistive tech and the eternal debate over what counts as fair play. In this case, the experiment plays out in an aim trainer rather than a competitive match, highlighting the project’s spirit of exploration rather than exploitation.
Beyond the laughs and spectacle, the project is a showcase of modern maker tools: affordable motors and sensors, compact AI compute on the Jetson platform, and a YOLO-based model trained to detect targets in real time. It’s a testament to how far DIY robotics and computer vision have come, and how creatively they can be applied to gaming performance.
Whether you’re into AI, electronics, or speedrunning your way up a leaderboard, this build is a fascinating look at human–machine collaboration. And if you’re curious about the journey—from failed prototypes to that nail-biting final push—Zetta walks through the entire saga in his latest video on his channel.